
Шаговые двигатели постоянного тока очень часто используют при работе с установками с числовым программным руководством и робототехнике. Главная отличительная особенность такого вида двигателя – это то, как именно действует.
Суть в том, что его работа не непрерывна, а осуществляется пошагово со сменой установленного угла оборота на один шаг. Так образом рабочий элемент имеет конкретный угол поворота в определенный момент, что позволяет контролировать процесс.
Питание такого мотора делимое, совершаемое импульсно. Именно импульсы и обеспечивают поворот вала на какой-то установленный угол.
В основном такие двигатели функционируют совместно с редуктором, который делает установку на валу максимально четкой и с энкодером, который определяет положение вала в данное время. Все эти детали нам нужны для передачи и меняет угол вращения.
Сегодня мы хотим поделиться с вами своими знаниями о данном типе механизмов, о том, как он работает и зачем нужен.
Конструкция шагового двигателя

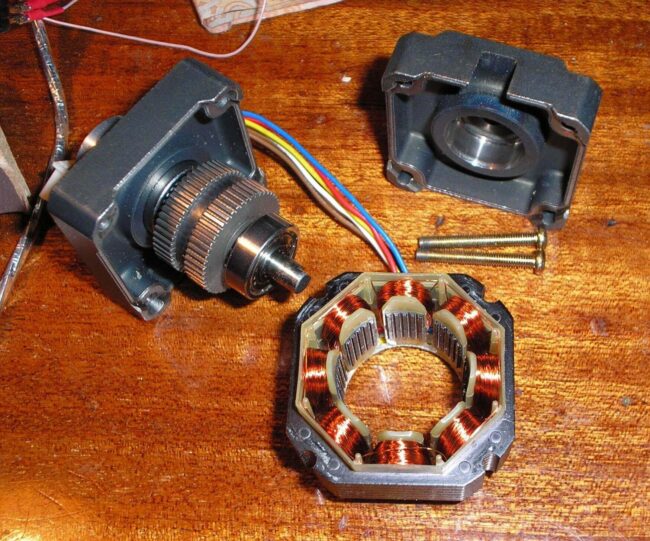
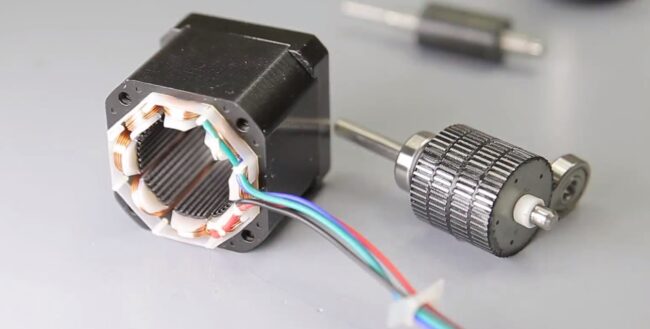
Если классифицировать данный тип мотора, то его мы отнесем к бесколлекторному синхронному мотору, в составе которого присутствуют статор и ротор.
Ротор имеет раздельные отсеки, состоящие из электротехнической стали, имеет «зубатую» структуру, а они разграничены постоянными магнитами. Статоре имеет специальные обмотки, которые схожи с катушками.
Как же это выглядит на деле?
Понять механизм действия шагового двигателя поможет схематическое изображение. первая позиция: на обмотки А и В подается напряжение установленной полярности.
Затем в статоре формируется электромагнитное поле. в силу того, что разноименные полюса притягиваются, ротор примет свою позицию по оси магнитного поля.
Кроме этого, поле шагового двигателя защищает от возможных действий с целью поменять позицию ротора снаружи. Упростив длинные объяснения, можно сказать так: магнитное поле статора обеспечивает установленную позицию ротора, несмотря на тяжесть.
При условии, когда на обмотки D и С попадает напряжение такой же полярности, электромагнитное поле меняет положение.

При этом ротор совершает шаг номер два, поворачиваясь на девяносто градусов. Третий шаг совершается, когда на обмотки А и В попадает напряжение обратной полярности.
При этом, ротор перемещается к положению, равному ста восьмидесяти градусам и устанавливается в положении, диаметрально противоположному первому.
Далее следует смещение к двумстам семидесяти градусам, когда на обмотки D и C приходится напряжение обратной полярности. Последний, четвертый шаг, совершается, когда на обмотки А и В подается напряжение с позитивным зарядом.
Таким образом, поворот станет равен тремстам шестидесяти градусам. Пропустить один из шагов не удастся. Ротор должен пройти полный оборот, шаг за шагом.
Если попытаться подключить обмотки из первого положения в четвертое, ротор сделает поворот в обратную сторону.
Обмотки бывают разные
В шаговых моторах используют биполярные или униполярные обмотки. Как это работает мы объясняли на примере биполярного устройства. Такой механизм предполагает применение отличных друг от друга фаз для снабжения обмоток.
Такая схема достаточно трудная, кроме того, для нее нужны сильные платы управления, которые стоят немалых денег.
Приборы с униполярными обмотками имеют более простой тип управления. Такие схемы имеют общий «плюс» подключения. На вторые выводы обмоток в порядке очереди подается «минус». Вот так и совершается работа ротора.
Каждый из этих типов имеет преимущества и недостатки. Биполярные шаговые моторы мощнее униполярных, их крутящий момент на сорок процентов превосходит униполярки, хотя вторые легче в управлении.
Типы двигателей по конструкции ротора
Шаговые двигатели делятся зависимо от типа устройства ротора Зависимо от того, какой ротор используют в конкретном устройстве, моторы можно разделить на следующие виды:
- с установленным магнитом;
- с альтернирующим магнитным противодействием;
- гибридные.
Шаговые двигатели с установленными магнитами на роторе аналогичны тем, о которых мы говорили ранее.
Есть разница только в одном аспекте: в настоящем устройстве магнитов очень много. Они расположены на одном диске.
Численность полюсов в нынешних двигателях достигает сорока восьми. Одна поступь в данном моторе равен семь с половиной градусов. Неплохо, да?
Шаговые двигатели с альтернирующим магнитным противодействием. Такой тип ротора в своей конструкции имеет мягкие магнитные сплавы, их так же именуют «реактивными шаговыми моторами».
Ротор состоит из дискретных пластин и в разрезе имеет вид зубчатого колеса.
Подобная схема строения нужна с той целью, что это позволяет замкнуть магнитный поток через зубцы колеса.
Преимущество данного типа мотора состоит вот в чем: здесь нет ничего, что затормозило бы работу двигателя. Соль в том, что ротор с установленными магнитами притягивается к частям двигателя, которые состоят из металла.
Обеспечить непрерывную работу шагового двигателя без напряжения практически невозможно. Но данный тип устройства эту проблему решил на корню. Но имеется и слабое место, а именно — маленький крутящий момент. Это значит, что одна поступь такого мотора будет равна от пяти до пятнадцати градусов.
Гибридный тип двигателя соединил оптимальные качества предшествующих. У них маленький шаг ( девять десятых – пять градусов), высокий момент и удерживающая способность. Главной фишкой тут мы считаем максимальную точность работы аппарата.
Этот двигатель используют в новых устройствах, где точность ставят первоочередной задачей. Но, есть одно «но» — цена.
За такое удовольствие придется дорого платить. Схематично такой ротор можно описать как цилиндр с магнитными свойствами, который имеет мягкомагнитные зубцы.
Проследим закономерность на деле: возьмем шаговый двигатель на двести шагов. Для него нужно два зубчатых диска, по пятьдесят зубцов.
Наш диск смещается на ползуба, таким образом, проем положительного полюса попадает на шип негативно заряженного . Итого, оказывается сто полюсов с обратной полярностью.
Методы управления шаговым мотором:
- Волновой. При таком типе управления напряжение поступает на одну из катушек, к ней притягивается ротор. Но такой вариант высокую мощность обеспечить не сможет.
- Полношаговое координирование осуществляется следующим образом: обе обмотки задействованы сразу, соответственно мощность будет высокой.
- Полушаговый. Это смесь из предыдущих двух методов. При таком типе управления напряжение идет поочередно: на одну обмотку, а потом – на обе. Таким образом, мы получим много шагов, высокую мощность, а так же в случае чрезмерного разгоне срабатывает удерживающая сила, которая тормозит мотор, когда это необходимо.
- Микрошаговое управление осуществляется с микроступенчатых импульсов. Это обеспечивает плавную работу мотора.
Плюсы и минусы шаговых моторов
Смело запишем к преимуществам следующее:
- высокие скорости старта, тормоза и реверса;
- вал делает оборот в согласно команде главного устройства на указанный угол;
- точная фиксация позиции после тормоза;
- четкость установки позиции;
- максимальная надежность в связи с отсутствием коллектора;
- обеспечение наибольшего крутящего момента при низких скоростях.

Минусы:
- есть риск изменения позиции в случае перегрузки вала, которая превышает ПДК для шагового мотора;
- риск резонанса;
- трудности в управлении;
- низкая скорость оборотов, хотя это не совсем минус, так так ШД применяют не для обеспечения вращения, а для обеспечения определенных позиций элемента в конкретный момент.
Наш шаговый мотор имеет второе имя, которое дает максимальное описание устройства, а именно: «электродвигатель с конечным числом положений ротора». Их используют в новых устройствах, таких, как 3D-принтеры, роботы, станки.
Конкурентоспособной альтернативой для него есть сервопривод, хотя они оба имеют свою нишу использования, которая определяется случаем.


